損失最小化制御による高効率駆動
High-Efficiency Drive via Loss Minimization Control
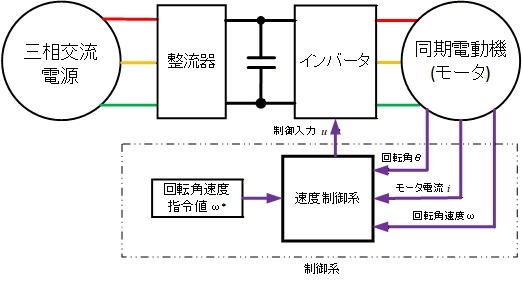
モータを駆動する際には、電流によって発生する銅損、摩擦などによる機械損、さらにパワーエレクトロニクス回路に起因するインバータ損など、さまざまなエネルギー損失が生じます。これらの損失は運転速度やトルク条件によって変化するため、単純に一定速度で運転するだけでは効率的とは限りません。
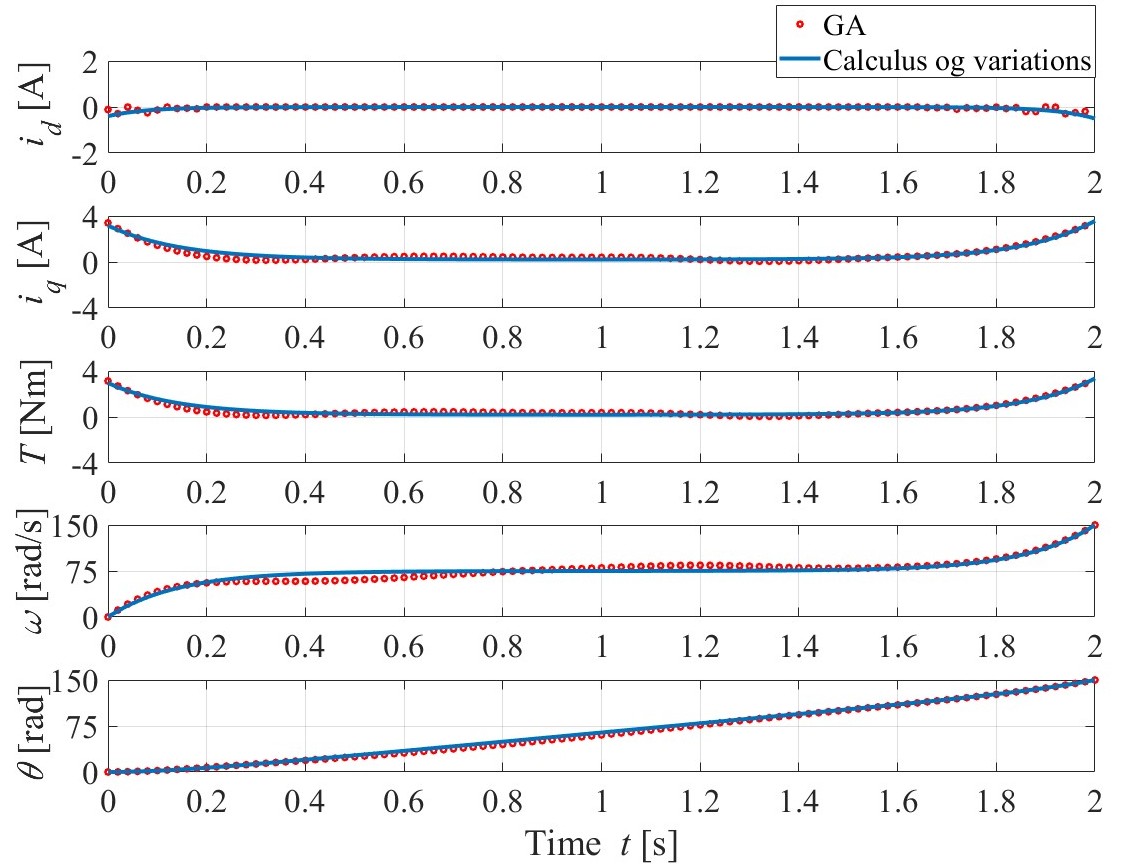
そこで本研究では、モータの損失マップを活用し、駆動開始から停止までの“全体の駆動時間”を通して総エネルギー損失が最小となるような速度軌道を設計します。速度軌道の最適化には、理論的に最適解を導く変分法と、遺伝的アルゴリズムを主に用いています。
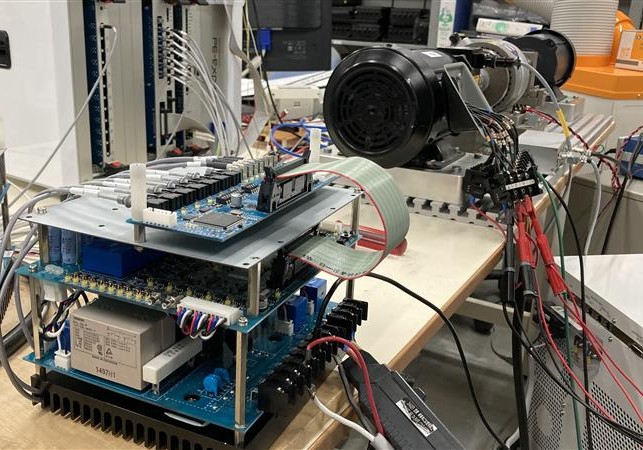
さらに、MATLAB/Simulinkによるシミュレーションによる解析だけでなく、実機(同期電動機・誘導電動機)を用いた検証を行うことで、理論の有効性を多角的に評価しています。
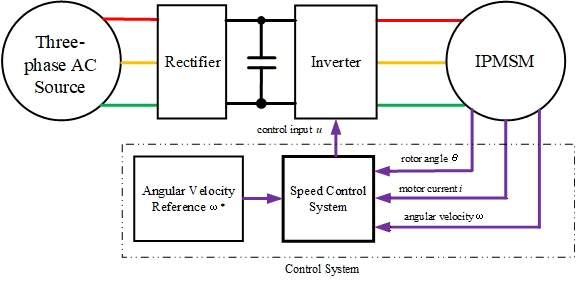
In motor drive systems, various energy losses occur, such as copper loss generated by current, mechanical loss due to friction, and inverter loss stemming from power electronic circuits. Since these losses vary depending on the operating speed and torque conditions, driving at a constant speed is not always the most efficient approach.
In this research, we utilize motor loss maps to design speed trajectories that minimize the total energy loss across the entire drive duration—from start to stop. To optimize these trajectories, we primarily employ two approaches: the Variational Method for deriving theoretical optimal solutions, and Genetic Algorithms (GA) for computational optimization.
Furthermore, we evaluate the validity of our theories through a multi-faceted approach, moving beyond MATLAB/Simulink simulations to include experimental verification using actual machines (synchronous and induction motors).